网络流
/ / 阅读耗时 64 分钟 本文介绍简单的网络流模型和相关算法,关于网络流的基础应用,见网络流应用专题。
2020.2.9更新可行流等进阶部分。
给定源点s和汇点t,中间有若干条结点做中转,有向边表示转运方向,权值代表最大容量。在这样的图下,汇点最多能够接收到的流量最大值是多少?这就是网络流的最大流问题。
下图就是一个网络流的模型图(来自刘汝佳紫书,有改动):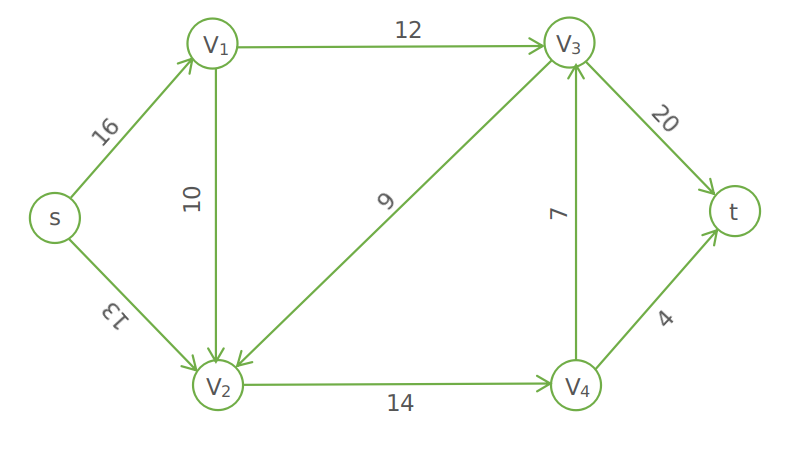
网络流最大流问题的三个性质
对于每一条边,它的最大流量转运上限称为容量(capacity),而这条边上的实际转运量称为流量(flow)。在最大流问题中,有三个基本性质:
- 容量限制:对于任意一条边(u,v),总是有f(u,v)≤c(u,v),即流量不可大于容量。
- 反对称性:f(u,v)=-f(v,u)。理解:把x个物品从u送到v就是把-x个物品从v送到u,-x可以用来描述有多少流量流到该结点。
- 流量平衡:对于除了源点和汇点的点,总有$\sum f(u,v)=0$(流入流出均衡)。
任何一种转运方案都需要满足上面三个性质。
残量网络
下面给出了一种转运方案,红色代表实际流量: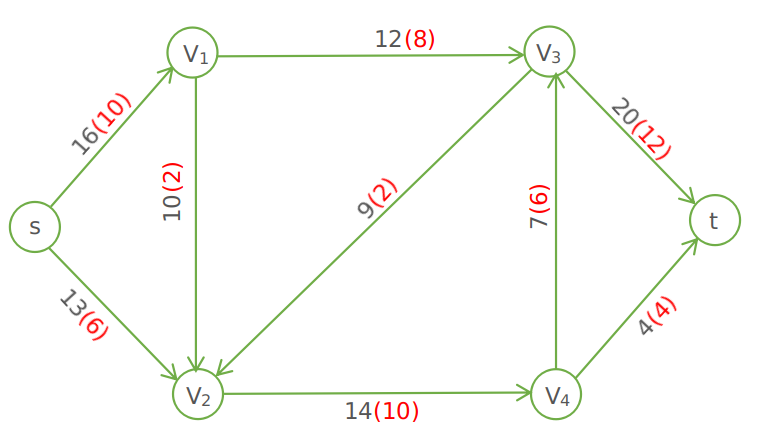
容易验证,这个流量设置满足前文提到的三个性质,这时汇点总流量为16,但是这不一定是最大流量。将每一条边权值变成容量与实际流量之差,可以得到: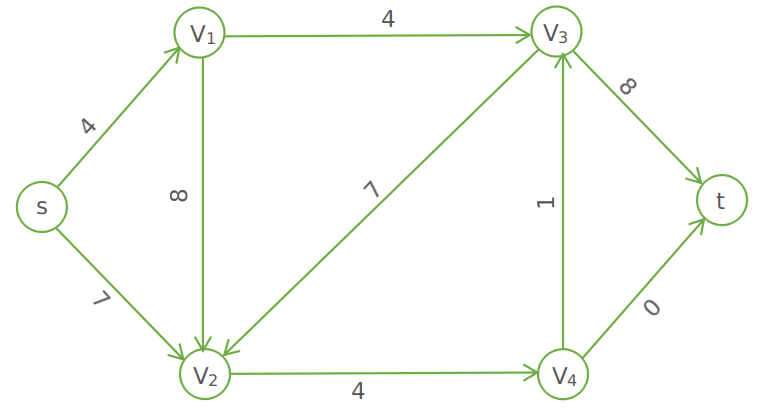
现在的边权代表“这条边还可以流过多少”,一个很直观的想法是:找到一条从s到t的路径,如果这条路上所有边的边权都大于0,那么总流量还可以加上路径上边权的最小值(注:这种路称为增广路)。比如我们发现走上面的三条边(边权为4、4、8)可以从s走到t,故总流量再加上4成为20,更新网络图,变成: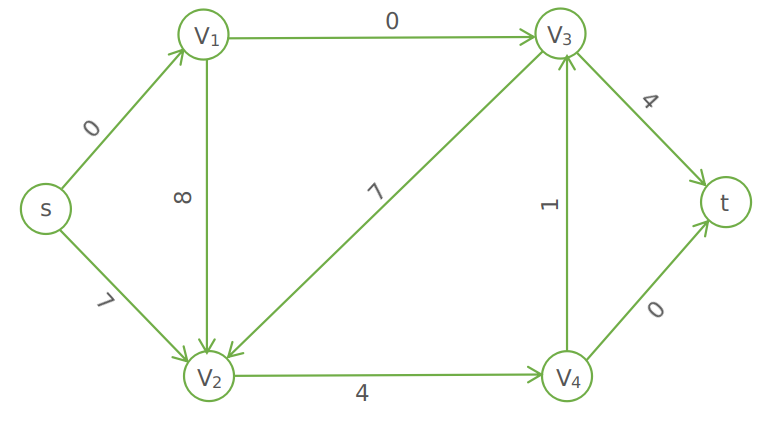
不断这样找,直到找不到增广路,得到的就是最大流吗?事实证明这种方法是错的。这是因为,我们的思路是尽可能地利用每一条边的价值,让它的流量尽可能地接近容量。因此在某一条边的流量确定时,它的流量就只能只增不降了。比如,按照这个算法,我们不可能让V1->V3的流量减小(也就是残量增大)。
问题来了,我们为什么要让好好的流量减小?让流量尽可能大不是更优吗?这只是直观上的感受,但事实上是错的,比如下面这个图(从网上找的图):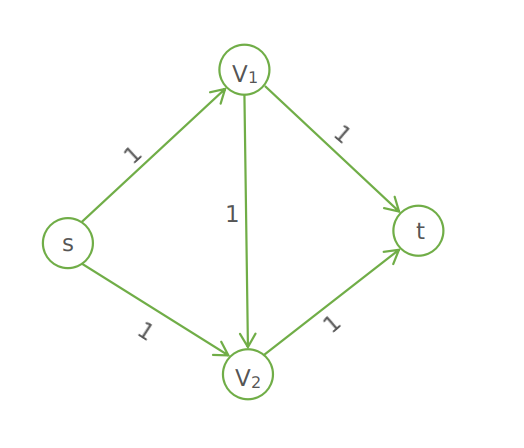
最大流显然是沿s->V1->t和s->V2->t时得到的2。可以发现,V1->V2的边连用都没用上,如果我们上来就把这条边用了(也就是流量为1),而它不能被减小,就只能得到错误的答案。
所以应该有一个可以将边流量减小(也就是怼回去)的机制。
如何解决?方法是给每一条边引入对应的反向边,反向边权值就是正向边已用的流量。上文已经说明反对称性,可以把反向边权值理解成反向的残量(反向走不通,容量为0,而流量为负)。原边(原有的边)权值表示这条路还可以走多少流量,反边权值表示这条路最多可以“反悔”多少流量。走正向边就是给这条边增加流量,走反向边就是给这条边减少流量。
给每一条边建立与之对应的反向边,并规定正向边权值为容量与流量之差,反向边权值为正向边流量,就得到了残量网络(residual network)。对于重边,我们可以不将它们合并,得到的结果是一样的。一开始的例子可以建立如下的残量网络: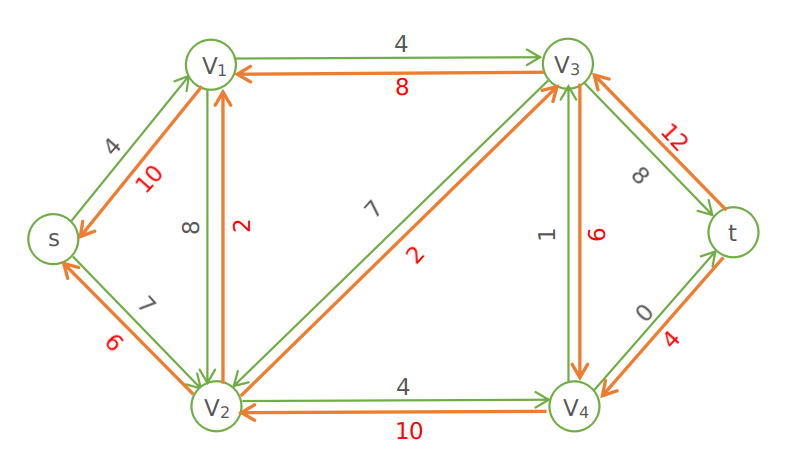
于是有著名的增广路定理:
【增广路定理】当且仅当残量网络中不存在增广路时,此时的流是s->t的最大流。
EK算法
给出一个图,我们建立它的残量网络图,不断寻找增广路更新最大流即可。如何寻求增广路?一个方法是BFS,这就是Edmonds-Karp算法(EK算法)。它的思想是不断用BFS找增广路,直到找不到为止。凡是找到一条,立即更新最大流和对应的边权。
下面有一个小技巧:每找到一条边,立即建立它对应的反向边。将边从0开始标号,那么0和1是一对正向边和反向边,2和3也是一对…这样对于编号为x的边,它对应的反向边编号就是x^1,反向边找正向边也是这种方法。
下面给出洛谷P3376模板题的EK算法代码。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
using namespace std;
struct {
int to, next, v;
} edge[100000 * 2];
int head[10005], cnt = 0, n, m, b, e, pre[10005], flow[10005], ans = 0;//pre是点的前导边标号
queue<int> que;
inline void add(int x, int y, int z) {
edge[cnt].to = y, edge[cnt].next = head[x], edge[cnt].v = z, head[x] = cnt++;
}
int BFS() {
while (!que.empty())que.pop();
for (int i = 1; i <= n; i++)pre[i] = -1;
pre[b] = 0;
que.push(b), flow[b] = 0x7fffffff;//flow是到这个流的最小边权
while (!que.empty()) {//BFS每次只找一个增广路
int f = que.front();
if (f == e)break;//到达汇点,立即结束
que.pop();
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i].v > 0 && pre[edge[i].to] == -1) {
pre[edge[i].to] = i, flow[edge[i].to] = min(flow[f], edge[i].v), que.push(edge[i].to);
}
}
}
if (pre[e] == -1)return -1;//没有增广路
return flow[e];//返回途径的最小权值
}
int main() {
cin >> n >> m >> b >> e;
for (int i = 1; i <= n; i++)head[i] = -1;
for (int i = 1; i <= m; i++) {
int u, v, w;
cin >> u >> v >> w;
add(u, v, w), add(v, u, 0);//加边,后边是反向边,权值为0
}
int increase;
while ((increase = BFS()) != -1) {//直到找不到反向边
int p = e;
while (p != b) {//回退找路
edge[pre[p]].v -= increase, edge[pre[p] ^ 1].v += increase;
p = edge[pre[p] ^ 1].to;//更新边权值:前导边减去流量,对应的反边加上流量
}
ans += increase;//更新答案
}
cout << ans << endl;
return 0;
}
Dinic算法
可以发现EK算法效率的确不高,原因就在于进行了太多次BFS,每次只找一条增广路。这于是就有了Dinic算法。
Dinic算法基于分层图思想,它的算法步骤是:
- 从源点开始给图用BFS分层。每一次只能走边权大于0的边,得到到源点的最小边距。(源点层次序号为0)
- 从源点开始DFS,找到在当前分层图下的所有增广路。在当前分层图下的含义是:只能走边权大于0的边并且出点深度必须为该点深度加一。每找到一条更新权值和流量。
- 回到第一步继续分层,直到汇点不再与源点连通(也就是没法从源点开始获得汇点深度)。
1 |
|
Dinic算法就比较高效了,它可以AC掉上面提到的网络流模板题。这里还有一个优化:当前弧优化。
可以发现上面DFS代码中的break条件是limit==0。如果循环成功地进入了下一条边,说明上一条边的limit没有用完!这说明上一条边“费尽全力”地找增广路已经达到了极限,那么从这条边再找就不可能有增广路了。于是这条边应该被“废弃”以提高效率。我们用cur记录应该从哪一条边开始以优化算法,注意每次BFS时应重置cur。
下面是加入当前弧优化的Dinic算法代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
using namespace std;
struct {
int to, next, v;
} edge[100000 * 2];
int head[N], cnt = 0, n, m, b, e, ans = 0, deep[N], cur[N] = {0};
queue<int> que;
inline void add(int x, int y, int z) {
edge[cnt].to = y, edge[cnt].next = head[x], edge[cnt].v = z, head[x] = cnt++;
}
int DFS(int x, int limit) {
if (limit == 0 || x == e)return limit;
int f, flow = 0;
for (int i = cur[x]; ~i; i = edge[i].next) {//从cur开始
cur[x] = i;//记录当前的边
if (deep[edge[i].to] == deep[x] + 1 && (f = DFS(edge[i].to, min(limit, edge[i].v)))) {
edge[i].v -= f, edge[i ^ 1].v += f, flow += f, limit -= f;
if (!limit)break;
}
}
return flow;
}
bool BFS() {
while (!que.empty())que.pop();
for (int i = 1; i <= n; i++)deep[i] = n, cur[i] = head[i];//重置cur
deep[b] = 0, que.push(b);
while (!que.empty()) {
int f = que.front();
que.pop();
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i].v > 0 && deep[edge[i].to] == n) {
deep[edge[i].to] = deep[f] + 1, que.push(edge[i].to);
if (edge[i].to == e)return true;
}
}
}
return deep[e] != n;
}
int main() {
cin >> n >> m >> b >> e;
ans = 0;
for (int i = 1; i <= n; i++)head[i] = -1;
for (int i = 1; i <= m; i++) {
int u, v, w;
cin >> u >> v >> w;
add(u, v, w), add(v, u, 0);
}
while (BFS())ans += DFS(b, 0x7fffffff);
cout << ans;
return 0;
}
ISAP算法
下面介绍另一种算法:ISAP算法。这也是一种高效的求最大流的方法。Dinic算法不停地进行BFS重新分层,能不能便DFS边更新深度呢?这就是ISAP算法的思想。它的算法步骤是:
- BFS分层(这里是从汇点开始),只能走其反向边权值非0的边,相当于逆着正边走,得到深度。
- 从源点开始找增广路。事实上,我们经常用循环来进行这个过程。每次只能走边权非0并且深度为自身深度减一的出点,走到汇点时更新答案和边权。当该点没有任何合法出点时更新其深度。
当源点深度大于或等于n(n为总结点数)时,不存在增广路。
更新深度的方法:找到该点所有边权非0的出点,在它们的深度中取最小值,那么点深度更新为这个最小值加一。
ISAP算法中有一个重要的优化:GAP优化。易知点的深度更新只能让深度不断变大,不可能变小。因此如果深度出现了断层(比如不存在深度为3的点,但是有深度为4和2的点),那么这个断层就不可能接上了(只有某深度为2的点找到一个深度也为2的出点并且边权非0才可能把深度更新成3,然而这种情况不可能发生)。根据我们点前进的顺序(深度递减)可知,源点必然在这个断层的前面,于是源点不可能再走到汇点了,判断出增广路不存在,直接break。这就是GAP优化。
代码不理解就当板子记吧。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
using namespace std;
struct {
int to, next, v;
} edge[100000 * 2];
int head[N], cnt = 0, n, m, b, e, ans = 0, deep[N], cur[N] = {0}, pre[N] = {0}, num[N] = {0};
queue<int> que;
inline void add(int x, int y, int z) {
edge[cnt].to = y, edge[cnt].next = head[x], edge[cnt].v = z, head[x] = cnt++;
}
inline void BFS() {//判深度
for (int i = 1; i <= n; i++)deep[i] = n, cur[i] = head[i];
que.push(e), deep[e] = 0;
while (!que.empty()) {
int f = que.front();
que.pop();
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i ^ 1].v > 0 && deep[edge[i].to] == n)deep[edge[i].to] = deep[f] + 1, que.push(edge[i].to);
}
}
}
int maxFlow() {//最大流统计
int flow = inf, p = e;
while (p != b) {
flow = min(flow, edge[pre[p]].v), p = edge[pre[p] ^ 1].to;
}
p = e;
while (p != b) {
edge[pre[p]].v -= flow, edge[pre[p] ^ 1].v += flow, p = edge[pre[p] ^ 1].to;
}
return flow;
}
inline void ISPA() {
int now = b;
BFS();
for (int i = 1; i <= n; i++)num[deep[i]]++;//深度数量统计
while (deep[b] < n) {
if (now == e) {//找到一条增广路
ans += maxFlow();//更新
now = b;//回到源点再找
}
bool flag = false;
for (int i = cur[now]; ~i; i = edge[i].next) {
if (deep[edge[i].to] == deep[now] - 1 && edge[i].v > 0) {
flag = true, cur[now] = i, pre[edge[i].to] = i, now = edge[i].to;
break;
}
}
if (!flag) {//没有合法出点,更新深度
int minn = n;
for (int i = head[now]; ~i; i = edge[i].next)if (edge[i].v > 0)minn = min(minn, deep[edge[i].to]);
num[deep[now]]--;
if (num[deep[now]] == 0)break;//GAP优化!!
deep[now] = minn + 1, num[deep[now]]++, cur[now] = head[now];//更新cur
if (now != b)now = edge[pre[now] ^ 1].to;//更新完深度,回退到这个点的前继,源点不用回退。
}
}
}
int main() {
cin >> n >> m >> b >> e;
ans = 0;
for (int i = 1; i <= n; i++)head[i] = -1;
for (int i = 1; i <= m; i++) {
int u, v, w;
cin >> u >> v >> w;
add(u, v, w), add(v, u, 0);
}
ISPA();
cout << ans;
return 0;
}
算出了最大流,怎么得到最佳方案?通过每一条原边(所有偶数边)的权值代表残量(也可以反向边直接得出流量),然后就可以得到最优时的流量分配方案了。
最小割问题
将网络流分成两个不相交点集S、T,使得s(源点)在S中,t(汇点)在T中。断开连接起点在S中终点在T中的所有原边,这时s和t不再连通,称这样的集合划分为一个割。割的容量定义为被断开边的容量之和,求最小割是一个与最大流联系紧密的问题。
有定理:
【最小割最大流定理】最小割容量等于最大流。
证明略。
这样我们就可以求最小割容量了,但是如何求最小割呢?EK算法结束时,我们得到了很多flow,它们当中大于0的点就是S集,剩下的是T集。注意这种方法要求在每次BFS前要清空一下flow(全部初始化成0)。Dinic算法和ISAP算法的方案求法待以后更新。
一个待验证的假说:求完最大流之后边权变为0的原边就是被割掉的边。
最小割点数量也是经典问题,但是最小割最大流定理只适用于割边。我们可以将每一个点分成两个点,一个连接点的入边,另一个连接点的出边,并在两点间加一条容量为1的边(注意源点和汇点中间边的边权为无穷大,因为通常不能割这两个点),这样就把割点问题转化为割边问题。
费用流问题
在原有图的基础上加入“费用”,总费用为单位费用乘以这条边的流量。得到最大流的方案很多,但是其中有一种花费最少。最小费用最大流问题也是一类重要问题。
解决方法是将EK算法中的BFS改成SPFA,根据最短路径(将费用看成边权)来找增广路。它和普通的EK算法相比,有以下几点区别:
- 边的属性增加了一个费用,反边的费用是正边的相反数
- 普通EK算法的BFS中,pre一旦确定便不再改变。但费用流下需要改变。
这样优先选择最短路增广,得到的一定是最优解。
下面给出EK算法费用流问题的模板代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
using namespace std;
struct {
int to, next, v, price;
} edge[100000 * 2];
int head[10005], cnt = 0, n, m, b, e, pre[10005], flow[10005], ans = 0, dict[10005], vis[10005], minCost = 0;
queue<int> que;
inline void add(int x, int y, int z, int p) {
edge[cnt].price = p, edge[cnt].to = y, edge[cnt].next = head[x], edge[cnt].v = z, head[x] = cnt++;
}
int SPFA() {
while (!que.empty())que.pop();
for (int i = 1; i <= n; i++)flow[i] = dict[i] = 0x7ffffff, vis[i] = 0, pre[i] = -1;//初始化
pre[b] = -1, vis[b] = 1, dict[b] = 0, que.push(b);
while (!que.empty()) {
int f = que.front();
que.pop(), vis[f] = 0;
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i].v > 0 && dict[edge[i].to] > dict[f] + edge[i].price) {//注意:这里没有要求pre[edge[i].to]==-1的限制,因为前导边需要根据最短路径的改变而改变
dict[edge[i].to] = edge[i].price + dict[f];
pre[edge[i].to] = i, flow[edge[i].to] = min(flow[f], edge[i].v);
if (vis[edge[i].to] == 0)que.push(edge[i].to), vis[edge[i].to] = 1;
}
}
}
if (pre[e] == -1)return -1;
return flow[e];
}
int main() {
ios::sync_with_stdio(false);
cin >> n >> m >> b >> e;
for (int i = 1; i <= n; i++)head[i] = -1;
for (int i = 1; i <= m; i++) {
int u, v, w, p;
cin >> u >> v >> w >> p;
add(u, v, w, p), add(v, u, 0, -p);
}
int increase;
while ((increase = SPFA()) != -1) {
int p = e;
while (p != b) {
edge[pre[p]].v -= increase, edge[pre[p] ^ 1].v += increase;
p = edge[pre[p] ^ 1].to;
}
ans += increase;
minCost += increase * dict[e];//加上费用
}
cout << ans << " " << minCost;
return 0;
}
zkw费用流
除了EK+SPFA的费用流算法,还有另一种算法比较常用,那就是zkw费用流算法。
EK+SPFA是EK算法的修改版,每次只进行一次增广,效率比较低下。这里可以借鉴Dinic的多次增广思路得到zkw费用流算法,它在一些情况下比EK+SPFA更高效。
zkw费用流很像Dinic算法。它将BFS改成SPFA并修改了标号过程,代码如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15inline bool SPFA() {
for (int i = 1; i <= n; i++)vis[i] = 0, dict[i] = 0x7fffffff;
que.push(t), dict[t] = 0, vis[t] = 1;//与Dinic不同的是,zkw费用流反向编号,即从汇点开始
while (!que.empty()) {
int f = que.front();
que.pop(), vis[f] = 0;
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i ^ 1].v > 0 && dict[edge[i].to] > dict[f] + edge[i ^ 1].price) {//走反边
dict[edge[i].to] = dict[f] + edge[i ^ 1].price;
if (!vis[edge[i].to])que.push(edge[i].to), vis[edge[i].to] = 1;
}
}
}
return dict[s] != 0x7fffffff;
}
按道理,DFS过程就应该修改成:1
2
3
4
5
6
7
8
9
10
11int DFS(int x, int limit) {
if (x == t || limit == 0)return limit;
int f, flow = 0;
for (int i = head[x]; ~i; i = edge[i].next) {
if (dict[edge[i].to] == dict[x] - edge[i].price && (f = DFS(edge[i].to, min(limit, edge[i].v)))) {
edge[i].v -= f, edge[i ^ 1].v += f, limit -= f, flow += f, ans += f * edge[i].price;//ans记答案
if (limit == 0)break;
}
}
return flow;
}
这样做没什么错,只是会导致DFS递归次数过多,可能会RE或MLE。为解决这个问题,我们在DFS时规定每一个点只能遍历一次,这样就可以得到下面的代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15int DFS(int x, int limit) {
if (x == t || limit == 0) {
vis[x] = 1;
return limit;
}
int f, flow = 0;
vis[x] = 1;//用vis数组标记已被访问
for (int i = head[x]; ~i; i = edge[i].next) {
if (vis[edge[i].to] == 0 && dict[edge[i].to] == dict[x] - edge[i].price && (f = DFS(edge[i].to, min(limit, edge[i].v)))) {
edge[i].v -= f, edge[i ^ 1].v += f, limit -= f, flow += f, ans += f * edge[i].price;
if (limit == 0)break;
}
}
return flow;
}
和Dinic相同,在主函数中,这样去用:1
while (SPFA()) flow += DFS(s, 0x7fffffff);
为进一步提高效率,可以使用下面的方式:1
2
3
4while (SPFA()) {
do memset(vis, 0, sizeof(vis)), flow += DFS(s, 0x7fffffff);
while (vis[t]);
}
dijkstra费用流
鉴于SPFA容易被卡,我们有必要了解一下dijkstra版本的EK费用流。但是现在有一个问题:边权可能是负的(指反边费用),dijkstra不支持带负边权的最短路,如何解决?
现在需要一种机制消去负边,以满足dijkstra的要求。
我们考虑给每一个点一个“势”,用数组$h[x]$存起来,在求边权时,计入两个点对应的势。对于$u->v$的一条有向边,我们这样计算它的边权:
(这里$w$是边的实际边权)然后可以得到含势的最短路不等式:
为了让计算时边权非负,当然要满足$w+h[u]-h[v]\geq 0$。
如果势是可以求出的,那么就可以用dijkstra求从源点到汇点的最短路,假设这一条最短路是$S->V_1->V_2->\cdots->T$,那么求出的最短路径长度是:
无论最短路是什么形式,最终求出的结果就是实际结果加上$h_S-h_T$,减去这个值就可以得到实际的最短路。那么现在如何求这个势?
当费用都保证非负时,一开始增广一定沿着原边,不可能出现负数边权的情况,于是第一次的增广不用加入势,直接跑一遍dijkstra即可,当然也可以理解成起初势都为0。对于费用为负的情况,在此之前先跑一遍SPFA就好,然后以最短路径dis作为点的势,这里的SPFA只需要跑一遍,不会成为性能瓶颈(如果因为这一遍SPFA卡T了,那么八成是图建的不好)。
但是从第二次开始,就可能沿反边增广,出现负边权。每一次增广结束时,我们累加每一次的$dis[i]$进入$h[i]$,来得到下一次增广的势,这样做是正确的,可以证明它可以保证$w+h[u]-h[v]\geq 0$。
简单证明如下,考虑用数学归纳法。
假设这一次满足:
那么下一次增广时:
那么:
证毕。
下面给出手写堆+dijkstra+EK的费用流模板题代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
using namespace std;
struct Edge {
int next, to, v, p;
} edge[50005 << 1];
int head[5005], n, m, S, T, h[5005], heap[5005], dis[5005], size, ID[5005];
int flow[5005], pre[5005], ans, minCost;
inline void add(int x, int y, int v, int p) {
static int cnt = 0;
edge[cnt].to = y, edge[cnt].next = head[x], edge[cnt].v = v, edge[cnt].p = p, head[x] = cnt++;
edge[cnt].to = x, edge[cnt].next = head[y], edge[cnt].v = 0, edge[cnt].p = -p, head[y] = cnt++;
}
void down(int x) {
int x1 = x << 1, x2 = x << 1 | 1, minn = x;
if (x1 <= size && dis[heap[x1]] < dis[heap[minn]])minn = x1;
if (x2 <= size && dis[heap[x2]] < dis[heap[minn]])minn = x2;
if (x != minn)swap(heap[x], heap[minn]), swap(ID[heap[x]], ID[heap[minn]]), down(minn);
}
void up(int x) {
if (x == 1)return;
if (dis[heap[x >> 1]] > dis[heap[x]])swap(heap[x >> 1], heap[x]), swap(ID[heap[x >> 1]], ID[heap[x]]), up(x >> 1);
}
inline void add(int x) {
ID[x] = ++size, heap[size] = x, up(size);
}
inline int top() {
int t = heap[1];
ID[heap[1]] = 0;
if (size != 1)ID[heap[size]] = 1, heap[1] = heap[size--], down(1);
else size = 0;
return t;
}
inline int dijkstra() {
for (int i = 1; i <= n; i++)pre[i] = -1, dis[i] = inf;
dis[S] = 0, add(S), flow[S] = inf;
while (size) {
int f = top();
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i].v > 0 && dis[edge[i].to] > dis[f] + edge[i].p + h[f] - h[edge[i].to]) {
dis[edge[i].to] = dis[f] + edge[i].p + h[f] - h[edge[i].to];//注意这里
flow[edge[i].to] = min(flow[f], edge[i].v);
pre[edge[i].to] = i;
if (ID[edge[i].to])up(ID[edge[i].to]);
else add(edge[i].to);
}
}
}
return pre[T] != -1;
}
int main() {
scanf("%d%d%d%d", &n, &m, &S, &T), memset(head, -1, sizeof(head));
for (int i = 1, a, b, c, d; i <= m; i++)scanf("%d%d%d%d", &a, &b, &c, &d), add(a, b, c, d);
while (dijkstra()) {
int to = T;
while (to != S)edge[pre[to]].v -= flow[T], edge[pre[to] ^ 1].v += flow[T], to = edge[pre[to] ^ 1].to;
ans += flow[T], minCost += flow[T] * (dis[T] - h[S] + h[T]);//最后减去势
for (int i = 1; i <= n; i++)h[i] += dis[i];//势累加
}
printf("%d %d", ans, minCost);
return 0;
}
最大流与二分图匹配
之前的博客提到了二分图匹配的匈牙利算法,其实这种问题可以用网络流解决。
二分图最大基数匹配
二分图不带权值,只是单纯的匹配,既可以用网络流也可以用匈牙利算法解决。对于二分图的两个点集A、B,我们建立起点在A中,终点在B中的有向边,权值均为1(这里相当于改造原二分图);再建立一个源点s,指向所有A中的点,权值为1,建立汇点t,所有B中的点都指向t,权值也为1。在这个图上求得的最大流就是最大匹配数。
二分图最大权完美匹配
二分图带权值,需要找到权值和最大的匹配方案,完美匹配是指所有点都需要被匹配进去,这时匈牙利算法便不再适用了。这种问题可以用费用流解决:将原图的费用设置成权值的相反数,其余我们自己加的边费用设为0,求最小费用最大流即可。显然最小费用的相反数就是最大权值。如果从源点s出发的点不是全部满载,则完美匹配不存在,否则原图中流量为1的边为最佳匹配边。
二分图最大权匹配
不要求完美匹配时(即对匹配数不要求)也可以用费用流解决。引入一个新结点P,所有A集合上的点增加一条指向P的边,容量为1,费用为0,同时P引一条边指向汇点t,容量无穷大,费用为0。建完图后求最小费用最大流。这样最大流一定是A中点的个数,但我们给了每个点一个不走B集合点的机会(即从P流向t),这样就得到了最大权。原图中流量为1的边为最佳匹配边。
以下是网络流模型的较高级部分。
可行流
对于一条边,在其流量限制的基础上,我们加上一个最小流限制。称最小的经过流量为下界,最大的流量为上界。在这里,记边$e$的上下界分别为$up(e)$与$down(e)$。
这样,容量限制可以表示成边$e$的实际经过流量$f(x)$满足:
紧接着考虑点的流量平衡。对于点$x$,我们称其流入流量为$in(x)$,流出流量为$out(x)$,那么流量平衡可以表示为:
现在,假设我们得到了一张图,它的边上有上下界流量限制,如果存在一种流量配置,即满足流量限制,且所有点满足流量平衡,那么称这一种流量配置为一个可行流。这一种网络流模型中不存在源点和汇点,称为无源汇可行流。
无源汇可行流中没有源点汇点,流量是凭空产生的,不容易解决。事实上,有一种方法可以将无源汇可行流转化为朴素的最大流问题。
首先将所有的边的最大限制变成$up(e)-down(e)$,这样最小限制就是$0$,于是转化为普通的最大流问题,但是这样明显是不对的,因为它可能不满足流量平衡性质。考虑转化后的点$x$的实际流量$in(x)-out(x)=0$,但是实际上的流量为$in(x)+out(x)+\sum indown(x)-\sum outdown(x)$。这里的$\sum indown(x)$是指向$x$的所有边的最小容量限制$down(e)$之和,$outdown(x)$是流出$x$的最小容量限制和。后面的求和式显然不是恒为$0$的,这样$x$的流量平衡就会被打破。
为了消除这种差异,引入新的源点$S$和汇点$T$,并定义$d(x)=\sum indown(x)-\sum outdown(x)$。这样对于所有的点,添加新边:
- 若$d(x)>0$,则建立$S$指向$x$,最大流量限制为$d(x)$的边。
- 若$d(x)<0$,则建立$x$指向$T$,最大流量限制为$-d(x)$的边。
- $d(x)=0$时忽略。
容易发现,在引入这些边后,我们从外界引入流量消除了因最小容量限制和带来的差异,若此时存在一种流量配置可以使$S$到$T$满流,那么对于除了源点和汇点的每一个点,必然都满足流量平衡条件。若此时不满流,则可行流不存在。这样就得到了一种将无源汇可行流问题转化为最大流的正确算法。
模板SGU194。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
using namespace std;
struct Edge
{
int next, to, v;
} edge[100005];
int cnt, d[205], n, m, head[205], s, t, dep[205], ans, H, low[100005];
queue<int> que;
inline void add(int x, int y, int v)
{
edge[cnt].next = head[x], edge[cnt].to = y, edge[cnt].v = v, head[x] = cnt++;
edge[cnt].next = head[y], edge[cnt].to = x, edge[cnt].v = 0, head[y] = cnt++;
}
inline int BFS()
{
for (int i = s; i <= t; i++) dep[i] = inf;
que.push(s), dep[s] = 0;
while (!que.empty()) {
int f = que.front();
que.pop();
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i].v > 0 && dep[edge[i].to] == inf) dep[edge[i].to] = dep[f] + 1, que.push(edge[i].to);
}
}
return dep[t] != inf;
}
int DFS(int x, int limit)
{
if (x == t || limit == 0) return limit;
int f, flow = 0;
for (int i = head[x]; ~i; i = edge[i].next) {
if (dep[edge[i].to] == dep[x] + 1 && (f = DFS(edge[i].to, min(edge[i].v, limit)))) {
edge[i].v -= f, edge[i ^ 1].v += f, limit -= f, flow += f;
if (limit == 0) break;
}
}
return flow;
}
int main()
{
memset(head, -1, sizeof(head)), scanf("%d%d", &n, &m), s = 0, t = n + 1;
for (int i = 1, a, b, l, r; i <= m; i++) {
scanf("%d%d%d%d", &a, &b, &l, &r), add(a, b, r - l), d[b] += l, d[a] -= l, low[i] = l;
}
for (int i = 1; i <= n; i++) {
if (d[i] > 0) add(s, i, d[i]), H += d[i];
if (d[i] < 0) add(i, t, -d[i]);
}
while (BFS()) ans += DFS(s, inf);
if (ans == H) {
printf("YES\n");
for (int i = 0; i < m; i++) {
printf("%d\n", edge[(i << 1) ^ 1].v + low[i + 1]);
}
} else {
printf("NO");
}
// PAUSE;
return 0;
}
现在考虑有源汇可行流。有源点和汇点的区别就是源点和汇点可以不满足流量平衡条件。我们可以从汇点引一条边指向汇点,下界为$0$,上界无穷大,这样平衡掉源汇点,就可以转化为无源汇的可行流问题。
可行流也有费用流问题,是求在可行流的基础上的最小费用问题。只需要将求最大流的过程改为最小费用最大流即可。
上下界有源汇网络流
先考虑有上下界的有源汇最大流。
要拥有最大流需要先有可行流,首先应该先求原图的可行流,在可行流存在的情况下再求解最大流。
接下来,我们撤掉因求可行流而引入的超级源点和超级汇点,而不撤掉从汇点引向源点的额外边。
这个过程可以这样解释:对于流入汇点的净流量,记为$f$,额外边引走的流量记为$p$,下界流和记为$d(T)$,那么:
紧接着,我们从$S$开始到$T$求最大流,进行增广过程,这样实际的最大流值为$f+\Delta f+d(T)$,也就是$p+\Delta f$。$p$这一段流量可以通过反向边获得,之后加上再获得的额外流就是实际的最大流。
当然,我们也可以撤掉额外边,此时答案就需要在最后的答案上手动加上$p$。为了与最小流对应,这种方法其实更推荐。
这样需要注意的一个问题是,在剥离超级源点汇点以及额外的边后,剩余的图其实并不是流量平衡的(其实这种非平衡的状态是我们有意设置的)。求最大流的过程不会对这种非平衡的状态产生影响,保证了算法的正确性。
模板Loj116。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
using namespace std;
struct Edge {
int next, to, v;
} edge[100005];
int cnt, d[205], n, m, head[205], s, t, dep[205], ans, H, ss, tt;
queue<int> que;
inline void add(int x, int y, int v) {
edge[cnt].next = head[x], edge[cnt].to = y, edge[cnt].v = v, head[x] = cnt++;
edge[cnt].next = head[y], edge[cnt].to = x, edge[cnt].v = 0, head[y] = cnt++;
}
inline int BFS() {
for (int i = 0; i <= n + 1; i++) dep[i] = inf;
que.push(s), dep[s] = 0;
while (!que.empty()) {
int f = que.front();
que.pop();
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i].v > 0 && dep[edge[i].to] == inf)
dep[edge[i].to] = dep[f] + 1, que.push(edge[i].to);
}
}
return dep[t] != inf;
}
int DFS(int x, int limit) {
if (x == t || limit == 0)
return limit;
int f, flow = 0;
for (int i = head[x]; ~i; i = edge[i].next) {
if (dep[edge[i].to] == dep[x] + 1 && (f = DFS(edge[i].to, min(edge[i].v, limit)))) {
edge[i].v -= f, edge[i ^ 1].v += f, limit -= f, flow += f;
if (limit == 0)
break;
}
}
return flow;
}
int main() {
memset(head, -1, sizeof(head)), scanf("%d%d%d%d", &n, &m, &ss, &tt), s = 0, t = n + 1;
for (int i = 1, a, b, l, r; i <= m; i++) {
scanf("%d%d%d%d", &a, &b, &l, &r), add(a, b, r - l), d[b] += l, d[a] -= l;
}
add(tt, ss, inf);
for (int i = 1; i <= n; i++) {
if (d[i] > 0)
add(s, i, d[i]), H += d[i];
if (d[i] < 0)
add(i, t, -d[i]);
}
while (BFS()) ans += DFS(s, inf);
if (ans == H) {
for (int i = head[s]; ~i; i = edge[i].next) edge[i].v = edge[i ^ 1].v = 0;//撤掉超级源点
for (int i = head[t]; ~i; i = edge[i].next) edge[i].v = edge[i ^ 1].v = 0;//撤掉超级汇点
s = ss, t = tt, ans = 0;//不撤额外边
while (BFS()) ans += DFS(s, inf);
printf("%d", ans);
} else {
printf("please go home to sleep");
}
// PAUSE;
return 0;
}
另一个问题是最小流。它和求最大流类似。撤掉超级源点汇点和额外边,从汇点$T$开始跑最大流,逆向回流,将多余可以空出的流量流回,就可以得到最小流。初始的流量就是额外边中的流量。
模板:Loj117。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
using namespace std;
struct Edge {
int next, to, v;
} edge[500005];
int cnt, d[60000], n, m, head[60000], s, t, dep[60000], ans, H, ss, tt, ed;
int cur[60000];
queue<int> que;
inline void add(int x, int y, int v) {
edge[cnt].next = head[x], edge[cnt].to = y, edge[cnt].v = v, head[x] = cnt++;
edge[cnt].next = head[y], edge[cnt].to = x, edge[cnt].v = 0, head[y] = cnt++;
}
inline int BFS() {
for (int i = 0; i <= n + 1; i++) dep[i] = inf, cur[i] = head[i];
que.push(s), dep[s] = 0;
while (!que.empty()) {
int f = que.front();
que.pop();
for (int i = head[f]; ~i; i = edge[i].next) {
if (edge[i].v > 0 && dep[edge[i].to] == inf)
dep[edge[i].to] = dep[f] + 1, que.push(edge[i].to);
}
}
return dep[t] != inf;
}
int DFS(int x, int limit) {
if (x == t || limit == 0)
return limit;
int f, flow = 0;
for (int i = cur[x]; ~i; i = edge[i].next) {
cur[x] = i;
if (dep[edge[i].to] == dep[x] + 1 && (f = DFS(edge[i].to, min(edge[i].v, limit)))) {
edge[i].v -= f, edge[i ^ 1].v += f, limit -= f, flow += f;
if (limit == 0)
break;
}
}
return flow;
}
int main() {
memset(head, -1, sizeof(head)), scanf("%d%d%d%d", &n, &m, &ss, &tt), s = 0, t = n + 1;
for (int i = 1, a, b, l, r; i <= m; i++) {
scanf("%d%d%d%d", &a, &b, &l, &r), add(a, b, r - l), d[b] += l, d[a] -= l;
}
ed = cnt, add(tt, ss, inf);
for (int i = 1; i <= n; i++) {
if (d[i] > 0)
add(s, i, d[i]), H += d[i];
if (d[i] < 0)
add(i, t, -d[i]);
}
while (BFS()) ans += DFS(s, inf);
if (ans == H) {
for (int i = head[s]; ~i; i = edge[i].next) edge[i].v = edge[i ^ 1].v = 0;
for (int i = head[t]; ~i; i = edge[i].next) edge[i].v = edge[i ^ 1].v = 0;
s = tt, t = ss, ans = edge[ed ^ 1].v, edge[ed].v = edge[ed ^ 1].v = 0;//撤掉额外边
while (BFS()) ans -= DFS(s, inf);
printf("%d", ans);
} else {
printf("please go home to sleep");
}
// PAUSE;
return 0;
}